EMAIL SUPPORT
dclessons@dclessons.comLOCATION
USDocker Swarm Overview
Docker Swarm Overview
Docker Swarm contains two components:
- Secure Cluster of Docker Hosts
- Engine for Orchestrating Micro services apps.
Docker Swarm contains more than two Docker hosts which can be on dedicated physical servers, or on VM, or on cloud instances and are able to communicate to each other over reliable network.
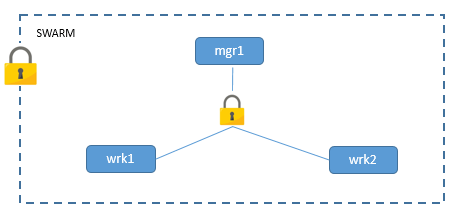
Now these Docker nodes can be configured as Manager or workers. Docker manager manages the control plane of cluster and also dispatches tasks to workers. All the configuration and state of swarm is located distributed etcd file located on all Managers.
Workers are accepts tasks from Managers and execute them.
TLS protocol is used between Managers and Workers to integrate and communicates each other. It is TLS who encrypt communication, authenticates nodes, and authorize roles.
Docker Swarm overview is shown below:
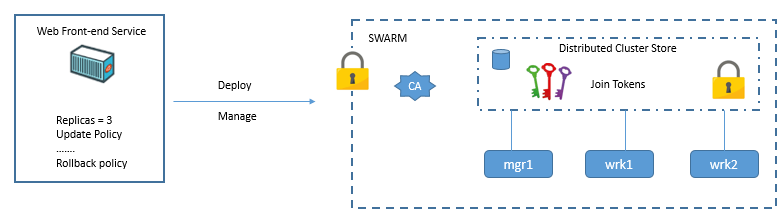
While creating the Swarm clusters, you need the following ports to be open on routers and Firewalls:
- 2377/tcp: For Secure Client to Swarm communication
- 7946/tcp and 7946/udp: For control plane communication
- 4789/udp: for VXLAN-based overlay networks
The basic steps to create Docker Swarm is given below:
- Initialize first Manager Node
- Join Additional Manager Node
- Join Workers Node
Initialize Docker Swarm:
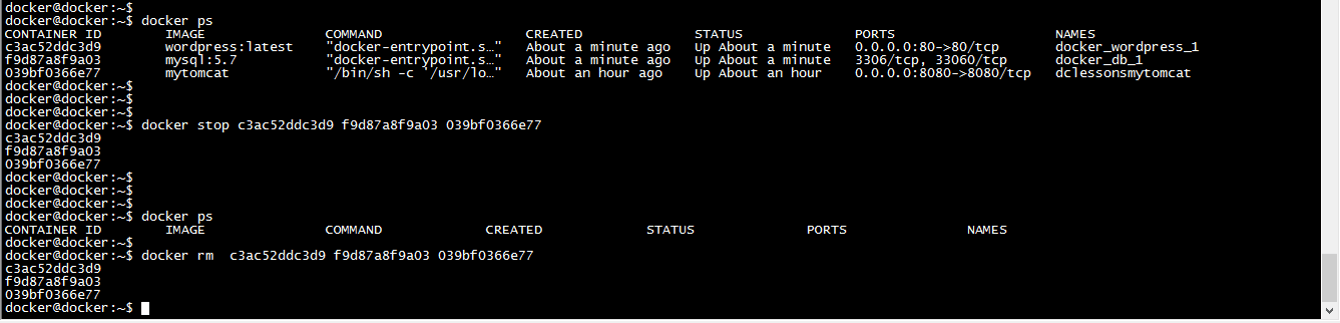
Step1: Check all working and active container and Stop them
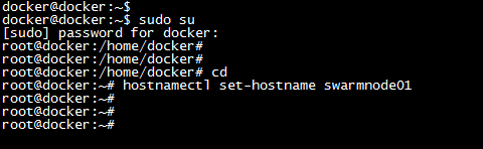
Step2: Create two Clone your Docker Host and rename it, as per given figure below:
Step3: Now Make Docker Node 1 as Manager by docker swarm init command. Once you do, it will create docker swarm join token to add workers, just copy it in another notepad. Now copy and Paste this token command to rest of two docker host. And verify Docker host on Node1.
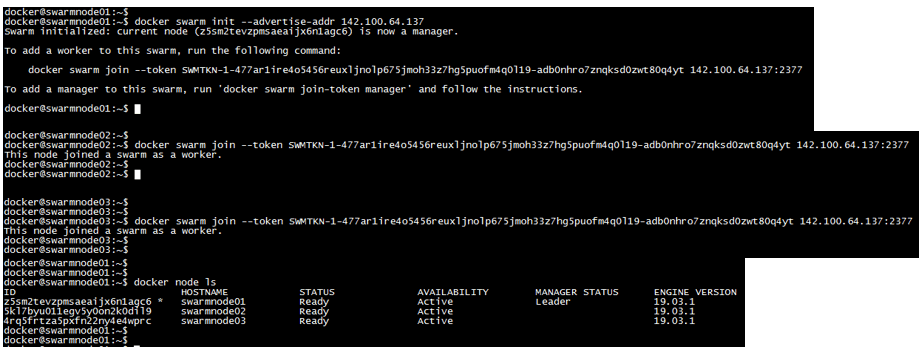
Step4: Once Command is properly executes, you will see three Docker Swarm Node, one is manager and rest two has been successfully registered as Workers.
Swarm Services:
Installing App or containers to execute an application is called as Docker Services. Let see how a service runs on Docker Swarm.

Comment
TABLE OF CONTENTS
RECENT POSTS
- What is Docker and Why is It Important?
- Learn Python 3.0 Programming for Network Automation
- Cisco ACI Data Centre: A Comprehensive Overview
- How to Prepare for the Microsoft Azure AZ-305 Exam
- AWS Training Certification Course for Solutions Architect
- Cisco SASE Architecture
- SASE vs SD-WAN
- What is SASE
- Accessing Amazon S3 using AWS private Link in Secure hybrid method.
- Cisco Smart Licensing Policy



LEAVE A COMMENT
Please login here to comment.